Robot States
Robots programmed with WPILib can be in one of four modes of operation, called states:
- Disabled: The robot does not accept user input and shouldn't move mechanisms. It is safe for humans to be around the robot while it is disabled. This is the default state.
- Teleoperated: The robot accepts user input and moves mechanisms. This is the most common state used while testing, and the teleoperated period of the FRC game is spent in this state.
- Autonomous: The robot does not accept user input, and instead goes through a sequence of preprogrammed actions. This state is active for the first 15 seconds in an FRC match.
- Emergency Stopped (E-Stopped): This is a special state which is identical to the disabled state, except that the bot cannot be re-enabled after it has been emergency stopped. This state is triggered by pressing the spacebar in FRC Driver Station.
Here's a table comparing each state:
| State | Moves | Accepts Input | Can Be Enabled |
|---|---|---|---|
| Disabled | No | No | Yes |
| Teleoperated | Yes | Yes | N/A |
| Autonomous | Yes | No | N/A |
| Emergency Stop | No | No | No |
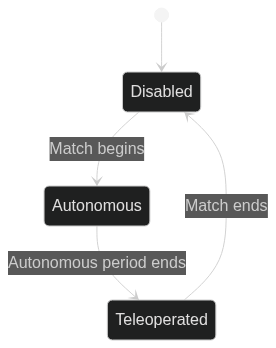
Excepting emergency stops, the code will follow this flowchart during a match:
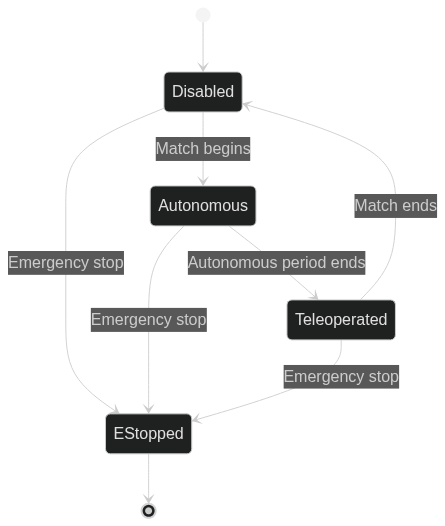
The complete flowchart with emergency stops looks like this: